park 正变换
通俗点讲就是在不断旋转变化的转子上再建立一个坐标系,因此可以通过
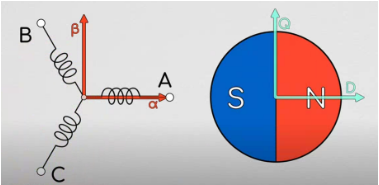
新坐标系不断旋转产生的差角 θ,称为电角度
映射后的 park 矩阵形式如下,根据规范
又因为矩阵运算
可以用 (A 的伴随 / A 的行列式) 求出 A 的逆
A 的逆为
因为毕达哥拉斯恒等式为:
所以最终的 park 逆变换矩阵为:
等式为:
在实际的 FOC 应用中,电角度是实时有编码器求出的,因此是已知的。
通常在简单的 FOC 应用中,我们只需要控制
而
通俗点讲就是在不断旋转变化的转子上再建立一个坐标系,因此可以通过
新坐标系不断旋转产生的差角 θ,称为电角度
映射后的 park 矩阵形式如下,根据规范
又因为矩阵运算
可以用 (A 的伴随 / A 的行列式) 求出 A 的逆
A 的逆为
因为毕达哥拉斯恒等式为:
所以最终的 park 逆变换矩阵为:
等式为:
在实际的 FOC 应用中,电角度是实时有编码器求出的,因此是已知的。
通常在简单的 FOC 应用中,我们只需要控制
而