Arduino笔记
点亮led灯
io输入
//int deng = 2; //IO2(D4)
int deng = 14; //IO14(D5)
void setup() {
pinMode(deng, OUTPUT); //设置指定io为输出模式
digitalWrite(deng, 0); //初始化为低电平,关闭灯状态
delay(3000); //先暂停3秒钟,保持关闭状态
// digitalWrite(deng, HIGH);
// digitalWrite(deng, LOW);
}
void loop() {
digitalWrite(deng, 1); //置引脚高电平,点亮LED
}
io输出
pinMode(button,INPUT_PULLUP); //设置按钮引脚为上拉模式
pinMode(deng, OUTPUT); //设置指定io为输出模式
digitalWrite(deng, 0); //初始化为低电平,关闭灯状态
if(digitalRead(button)==0){ //如果读取到按钮引脚为低电平,视为按钮被按下
digitalWrite(deng, 1); //置引脚高电平,点亮LED
}
串口监视器
void setup(){
Serial.begin(115200); //开启串口监视器,设置波特率115200
Serial.println(""); //打印输出一个空换行
Serial.println("程序开始运行"); //打印输出一句话
}
模拟输出
for(int i=0;i<=1023;i++){ //模拟输出0-1023,对应电源电压0V-5V
analogWrite(deng, i); //i的值不断变大,LED亮度逐渐提高
delay(1); //暂停时间,单位毫秒,用来延缓过程,展现效果
}
舵机
#include <Servo.h> //加载舵机库
Servo myservo; //定义一个舵机对象
int _servo = 14; //IO14(D5)
void setup() {
myservo.attach(_servo); //设置指定io为舵机
myservo.write(0); //开机设置舵机为0度
}
void loop() {
for(int i=0;i<=90;i++){ //控制舵机角度由0度旋转到90度
myservo.write(i); //i的值不断变大,角度偏转
delay(50); //暂停时间,单位毫秒,用来延缓过程,展现效果
}
for(int i=90;i>=0;i--){ //控制舵机角度由90度返回到0度
myservo.write(i); //i的值不断变小,角度偏转
delay(50); //暂停时间,单位毫秒,用来延缓过程,展现效果
}
}
模拟输入
读取电位器的输入
int analogPin = A0; // 模拟引脚A0
int ledPin = 14; // LED引脚(D5)
void setup() {
// Serial.begin(115200);
// Serial.println();
pinMode(ledPin, OUTPUT);
}
void loop() {
//ESP8266的模拟输入是0V-1V,区别于UNO和Nano的0V-5V
//ESP8266的模拟输入和模拟输出一样也是0-1023,同样区别于UNO和Nano的0-255
int analogValue = analogRead(analogPin); //整形变量接收模拟值
analogWrite(ledPin, analogValue); //把接收到的模拟值,设置为LED的模拟输出值,改变LED亮度
delay(1);
// delay(500);
// Serial.println(analogValue);
}
变量
bool bl=0; //布尔值,0和1
byte be=1; //一个字节存储8位无符号数,从0到255。
int i=2; //整数,占用2字节。整数的范围为-32,768到32,767
long l=3; //长整数,占用4字节,从-2,147,483,648到2,147,483,647。
float f=3.14; //浮点型数据,就是有一个小数点的数字。
char c='a'; //一个字符
String s="hello world!"; //特殊类型,字符串,字符的集合,拥有丰富的处理函数,可以对数据判断分析
unsigned int ui=3; //(无符号整型)与整型数据同样大小,占据2字节。它只能用于存储正数而不能存储负数,范围0-65,535
unsigned long ul=4; //(无符号长整型)与标准长整型不同,无符号长整型无法存储负数,其范围从0-4,294,967,295
const int abc=1; //const前缀为常量,这里定义了整形常量,常量的定义后,不能对它的值再去改变
EEPROM储存
byte 与 bool 类型储存
#include <EEPROM.h> //加载EEPROM的库
bool is=1; //布尔类型值
byte byte_1=220; //byte类型数值
char char_1= 'a'; //char字符
void setup(){
EEPROM.begin(1024); //开启EEPROM,开辟1024个位空间
//1.读取与保存byte类型,bool类型值的0和1包含0-255内
EEPROM.write(0,byte_1); //给EEPROM 第0位,写入byte_1的值
EEPROM.commit(); //保存EEPROM改变,区别于uno和nano,esp8266需要使用此函数 保存EEPROM
byte byte_2=EEPROM.read(0); //用byte类型读取接收EEPROM的值
Serial.print("byte_2的值:");
Serial.println(byte_2); //打印输出byte_2的值,等同于byte_1的值
//2.读取与保存char类型,和byte类型大致一样,读取时需要转换一下类型
EEPROM.write(0,char_1); //给EEPROM 第0位,写入char_1的值
EEPROM.commit(); //保存EEPROM改变,区别于uno和nano,esp8266需要使用此函数 保存EEPROM
char char_2=char(EEPROM.read(0)); //如果用char类型读取,需要转换接收EEPROM的值的类型
Serial.print("char_2的值:");
Serial.println(char_2); //打印输出abc_2的值,等同于char_1的值
}
int 型储存
#include <EEPROM.h>
int a=1234;
//使用union结构,多个不同类型变量,共用一个内存空间
union int_value{ //int 类型,定义一个结构
int i; //int类型成员变量
byte b[2]; //byte类型数组成员
};
int_value e_int; //定义一个结构对象
void setup() {
Serial.begin(115200);
Serial.println("");
EEPROM.begin(1024); //开启EEPROM,开辟1024个位空间
//一个字节保存不了的int,我们把它拆为2个字节保存,最后可以再组装回来,实现对int类型的保存和读取
e_int.i=a; //给e_int.i重新赋值为a
EEPROM.write(0,e_int.b[0]); //给EEPROM 第0位,写入e_int.b[0]的值
EEPROM.write(1,e_int.b[1]); //给EEPROM 第1位,写入e_int.b[1]的值
EEPROM.commit(); //保存EEPROM改变
byte a1=EEPROM.read(0); //a1获取EEPROM 0 位的值
byte a2=EEPROM.read(1); //a2获取EEPROM 1 位的值
e_int.b[0]=a1;
e_int.b[1]=a2;
Serial.print("e_int.i的值:");
Serial.println(e_int.i); //这里打印输出的e_int.i,其实就是间接的a
//最后说一下,long类型和int一样,用union类型操作,只是把成员改一下,long占用4个字节,读取和写入对应的一样的道理,这里就不再展示了
//float类型和long类型一样
}
void loop() {
}
string 类型
#include <EEPROM.h>
String str="hello"; //String字符串
void setup() {
Serial.begin(115200);
Serial.println("");
EEPROM.begin(1024); //开启EEPROM,开辟1024个位空间
//String类型,更会复杂,需要加点技巧,实现保存和读取
Serial.print("str的值:");
Serial.println(str); //先打印输出初始的str字符串的值
str="hello world"; //重新给str字符串赋值
set_String(0,1,str); //保存str字符串到EEPROM(长度位,起始位,字符串)
String s=get_String(EEPROM.read(0),1); //读取EEPROM里的str字符串(所取位数,起始位)
Serial.print("s的值:");
Serial.println(s); //打印输出此时的s对应str字符串的值
}
void loop() {
}
//用EEPROM的a位保存字符串的长度,字符串的从EEPROM的b位开始保存,str为要保存的字符串
void set_String(int a,int b,String str){
EEPROM.write(a, str.length());//EEPROM第a位,写入str字符串的长度
//通过一个for循环,把str所有数据,逐个保存在EEPROM
for (int i = 0; i < str.length(); i++){
EEPROM.write(b + i, str[i]);
}
EEPROM.commit();//执行保存EEPROM
}
//获取指定EEPROM位置的字符串,a是字符串长度,b是起始位,从EEPROM的b位开始读取
String get_String(int a, int b){
String data = "";
//通过一个for循环,从EEPROM中逐个取出每一位的值,并连接起来
for (int i = 0; i < a; i++){
data += char(EEPROM.read(b + i));
}
return data;
}
AP模式
#include <ESP8266WiFi.h>
const char *ssid = ""; //AP的SSID(WiFi名字)
const char *password = ""; //AP的密码
int led=14; //设置指示灯io,D5
void setup() {
Serial.begin(115200);
Serial.println("");
pinMode(led,OUTPUT);
digitalWrite(led,0);
WiFi.mode(WIFI_AP); //设置为AP模式
WiFi.softAP(ssid, password); //配置AP信息,并开启AP
//默认IP为192.168.4.1 , 这里我自定义设置AP的ip段
IPAddress softLocal(192,168,1,1); //IP地址,用以设置IP第4字段
IPAddress softGateway(192,168,1,1); //IP网关,用以设置IP第3字段
IPAddress softSubnet(255,255,255,0);
//配置自定义的IP信息
WiFi.softAPConfig(softLocal, softGateway, softSubnet);
IPAddress myIP = WiFi.softAPIP(); //用变量myIP接收AP当前的IP地址
Serial.println(myIP); //打印输出myIP的IP地址
}
void loop() {
int gotoAP=WiFi.softAPgetStationNum(); //获取当前连接到AP的设备数量
//如果没有设备连接到AP,熄灭LED灯,否则点亮LED灯
if(gotoAP==0){ //连接数为0,说明AP没有设备连接
digitalWrite(led,0); //熄灭LED灯
}else{
digitalWrite(led,1); //点亮LED灯
}
}
超声波模块
#include "SR04.h" //超声波库
int E=4; //IO4(D2),Echo 获取返回的超声波时间差
int T=5; //IO5(D1),Trig 给超声波模块发送指令
SR04 sr04 = SR04(E,T); //配置超声波的IO引脚
int deng = 14; //IO14(D5),LED指示灯
void setup() {
Serial.begin(115200);
Serial.println("");
pinMode(deng, OUTPUT); //设置指定io为输出模式
digitalWrite(deng, 0); //初始化为低电平,关闭灯状态
}
void loop() {
int a=sr04.Distance(); //获取当前距离值,返回给a
//如果距离小于等于10厘米,点亮led,如果距离大于10厘米,再次熄灭led
if(a<=10){
digitalWrite(deng, 1);
}
else{
digitalWrite(deng, 0);
}
//打印输出拼接格式,例如: 距离:24厘米
Serial.print("距离:");
Serial.print(a);
Serial.println("厘米");
delay(500);
}
oled显示屏
Adafruit库
#include <Wire.h>
#include <Adafruit_GFX.h>
#include <Adafruit_SSD1306.h>
#define SDA_PIN 8
#define SCL_PIN 9
Adafruit_ssd1306syp display(SDA_PIN,SCL_PIN);
#define SCREEN_WIDTH 128 // 设置OLED宽度,单位:像素
#define SCREEN_HEIGHT 64 // 设置OLED高度,单位:像素
// 自定义重置引脚,虽然教程未使用,但却是Adafruit_SSD1306库文件所必需的
#define OLED_RESET 3
Adafruit_SSD1306 display(SCREEN_WIDTH, SCREEN_HEIGHT, &Wire, OLED_RESET);
// 初始化OLED并设置其IIC地址为 0x3C
display.begin(SSD1306_SWITCHCAPVCC, 0x3C);
display.update(); //画面更新,也就是保存更改,在你制定显示内容后一定要调用此函数才能显示
display.clear(); //清空显示
display.setTextColor(WHITE); //设置颜色(白色,取决于你的显示屏) display.setTextColor(BLACK, WHITE); //反白,白底黑字
display.setCursor(0, 0); //设置光标位置
display.setTextSize(1); //设置字号
display.print("123"); //打印文字,不换行
display.println(“123”); //打印文字,换行
display.println(0xDEADBEEF, HEX); //以HEX格式输出
display.drawLine(0, 0, 127, 63,WHITE); 画线,从坐标(0,0)画直线到坐标(127,63)
display.display();
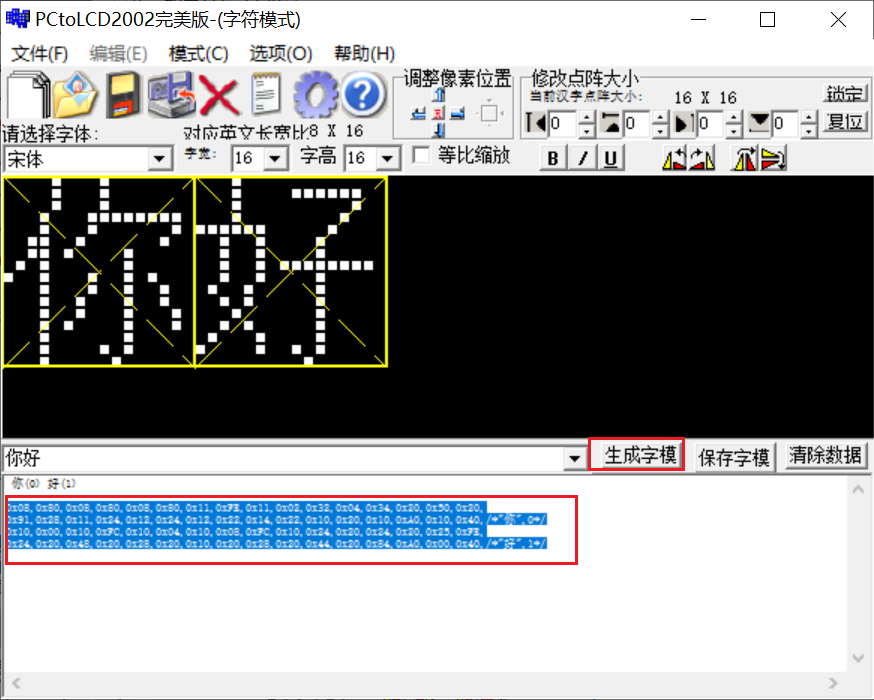
显示汉字
#define SCREEN_WIDTH 128 // 设置OLED宽度,单位:像素
#define SCREEN_HEIGHT 64 // 设置OLED高度,单位:像素
#define OLED_RESET 3
Adafruit_SSD1306 display(SCREEN_WIDTH, SCREEN_HEIGHT, &Wire, OLED_RESET);
static const unsigned char PROGMEM hans_ni[] = {
0x08,0x80,0x08,0x80,0x08,0x80,0x11,0xFE,0x11,0x02,0x32,0x04,0x34,0x20,0x50,0x20,
0x91,0x28,0x11,0x24,0x12,0x24,0x12,0x22,0x14,0x22,0x10,0x20,0x10,0xA0,0x10,0x40,/*"你",0*/
};
static const unsigned char PROGMEM hans_hao[] = {
0x10,0x00,0x10,0xFC,0x10,0x04,0x10,0x08,0xFC,0x10,0x24,0x20,0x24,0x20,0x25,0xFE,
0x24,0x20,0x48,0x20,0x28,0x20,0x10,0x20,0x28,0x20,0x44,0x20,0x84,0xA0,0x00,0x40,/*"好",0*/
};
void loop()
{
hans_display_0();
}
void hans_display_0(void)
{
// 显示之前清屏
display.clearDisplay();
// 显示文字 (左上角x坐标,左上角y坐标, 图形数组, 图形宽度像素点, 图形高度像素点, 设置颜色)
display.drawBitmap(20 * 1, 16, hans_ni, 16, 16, 1);
display.drawBitmap(20 * 2, 16, hans_hao, 16, 16, 1);
//显示图形
display.display();
delay(2000);
}


图片
需要bmp格式的单色图片
U8库
#include <U8g2lib.h>
#include <Wire.h>
定义接口
#define SCL 5
#define SDA 4
U8G2_SSD1306_128X64_NONAME_F_SW_I2C u8g2(U8G2_R0, /*clock=*/SCL, /*data=*/SDA, /*reset=*/U8X8_PIN_NONE);
setup
u8g2.begin();
u8g2.setFont(u8g2_font_unifont_t_symbols);
u8g2.firstPage();
u8g2.enableUTF8Print();//enable UTF8
u8g2.setFont(u8g2_font_wqy12_t_gb2312b);//设置中文字符集
do
{
u8g2.setCursor(0, 15); //指定显示位置
u8g2.print("WELCOME"); //使用print来显示字符串
u8g2.setCursor(0, 30); //指定显示位置
u8g2.print("MASTER"); //使用print来显示字符串
} while (u8g2.nextPage());
更多使用方法
https://www.bilibili.com/read/cv15542275?spm_id_from=333.788.b_636f6d6d656e74.16
建立web服务器,用页面控制硬件
#include <ESP8266WiFi.h>
#include <ESP8266WiFiMulti.h>
#include <ESP8266WebServer.h>
#include <FS.h>
ESP8266WiFiMulti wifiMulti; // 建立ESP8266WiFiMulti对象
ESP8266WebServer esp8266_server(80); // 建立网络服务器对象,该对象用于响应HTTP请求。监听端口(80)
连接wifi
wifiMulti.addAP("lnettwo", "lhl15352319937"); // 将需要连接的一系列WiFi ID和密码输入这里
判断wifi是否连接
int i = 0;
while (wifiMulti.run() != WL_CONNECTED) { // 尝试进行wifi连接。
delay(1000);
Serial.print(i++); Serial.print(' ');//打印连接时长
}
连接成功后打印ip
// WiFi连接成功后将通过串口监视器输出连接成功信息
Serial.println('\n');
Serial.print("Connected to ");
Serial.println(WiFi.SSID()); // 通过串口监视器输出连接的WiFi名称
Serial.print("IP address:\t");
Serial.println(WiFi.localIP()); // 通过串口监视器输出ESP8266-NodeMCU的IP
启动闪存系统
Serial Peripheral Interface Flash File System(SPIFFS)
#include <FS.h>
if(SPIFFS.begin()){ // 启动闪存文件系统
Serial.println("SPIFFS Started.");
} else {
Serial.println("SPIFFS Failed to Start.");
}
上传代码前需要点ESP8266 Sketch Data upload
esp8266_server服务器对象
esp8266_server.on("/LED-Control", handleLEDControl); // 告知系统如何处理/LED-Control请求
同时html包含
<form action="LED-Control"><input type="submit" value="LED控制"></form>
<form action="/LED-Control">
<input type="text" name="value1">
</br>
<input type="text" name="value2">
</br>
<input type="submit" value="OK">
</form>
通过Ajax控制及传输数据
esp8266_server.on("/setLED", handleLED);
esp8266_server.on("/readADC", handleADC);
void handleLED() {
String ledState = "OFF";
String LED_State = esp8266_server.arg("LEDstate"); //参考xhttp.open("GET", "setLED?LEDstate="+led, true);
Serial.println(LED_State);
if(LED_State != "0"){
digitalWrite(LED_BUILTIN,LOW); //LED 点亮
ledState = "ON"; //反馈参数
} else {
digitalWrite(LED_BUILTIN,HIGH); //LED 熄灭
ledState = "OFF"; //反馈参数
}
esp8266_server.send(200, "text/plain", ledState); //发送网页
}
void handleADC() {
int a = analogRead(A0);
String adcValue = String(a);
esp8266_server.send(200, "text/plain", adcValue); //发送模拟输入引脚到客户端ajax请求
}
在js中
<button type="button" onclick="sendData(1)">点亮 LED</button>
<button type="button" onclick="sendData(0)">关闭 LED</button><br>
//-------------js原生方法----------------------------------------------------------------
function sendData(led) {
var xhttp = new XMLHttpRequest();
xhttp.onreadystatechange = function() {
if (this.readyState == 4 && this.status == 200) {
document.getElementById("LEDState").innerHTML =
this.responseText;
}
};
xhttp.open("GET", "setLED?LEDstate="+led, true);
xhttp.send();
}
//------------jq方法----------------------------------------------------------------------
function sendData(led){
$.ajax({
type:'GET',
url:'setLED',
data:{
LEDstate:led,
},
success:(res)=>{
if(res.status == 200){
console.log(res);
document.getElementById("LEDState").innerHTML = res;
var text = '灯已打开';
if(res == "ON"){
transText(text);
}else{
text = '灯已关闭';
transText(text);
}
}
},
})
}
//结合文本转语音
function transText(text){
var url = "http://tts.youdao.com/fanyivoice?le=zh&keyfrom=speaker-target&word='" +encodeURI(text);
new Audio(url).play();
}
setInterval(function() {
// Call a function repetatively with 2 Second interval
getData();
}, 2000); //2000mSeconds update rate
function getData() {
var xhttp = new XMLHttpRequest();
xhttp.onreadystatechange = function() {
if (this.readyState == 4 && this.status == 200) {
document.getElementById("ADCValue").innerHTML =
this.responseText;
}
};
xhttp.open("GET", "readADC", true);
xhttp.send();
}
处理GET请求
esp8266_server.on("/ledHandle", ledHandle);
esp8266_server.onNotFound(handleUserRequet); // 告知系统如何处理用户请求
esp8266_server.begin(); // 启动网站服务
Serial.println("HTTP server started");
处理用户请求
void loop(void) {
esp8266_server.handleClient(); // 处理用户请求
}
处理/LED-Control请求
void handleLEDControl(){
bool ledStatus = digitalRead(LED_BUILTIN); // 此变量用于储存LED状态
ledStatus == HIGH ? digitalWrite(LED_BUILTIN, LOW) : digitalWrite(LED_BUILTIN, HIGH); // 点亮或者熄灭LED
esp8266_server.sendHeader("Location", "/LED.html");
esp8266_server.send(303);
}
从浏览器发送的信息中获取控制数值(字符串格式)
String value1 = esp8266_server.arg("value1");
String value2 = esp8266_server.arg("value2");
获取数值后赋值
// 从浏览器发送的信息中获取PWM控制数值(字符串格式)
String ledPwm = esp8266_server.arg("ledPwm");
// 将字符串格式的PWM控制数值转换为整数
int ledPwmVal = ledPwm.toInt();
// 实施引脚PWM设置
analogWrite(LED_BUILTIN, ledPwmVal);
// 建立基本网页信息显示当前数值以及返回链接
String httpBody = "value1: " + value1 + "<br> value2: " + value2 + "<p><a href=\"/LED.html\"><-LED Page</a></p>";
esp8266_server.send(200, "text/html", httpBody);
处理用户浏览器的HTTP访问
void handleUserRequet() {
// 获取用户请求网址信息
String webAddress = esp8266_server.uri();
// 通过handleFileRead函数处处理用户访问
bool fileReadOK = handleFileRead(webAddress);
// 如果在SPIFFS无法找到用户访问的资源,则回复404 (Not Found)
if (!fileReadOK){
esp8266_server.send(404, "text/plain", "404 Not Found");
}
}
处理浏览器HTTP访问
bool handleFileRead(String path) { //处理浏览器HTTP访问
if (path.endsWith("/")) { // 如果访问地址以"/"为结尾
path = "/index.html"; // 则将访问地址修改为/index.html便于SPIFFS访问
}
String contentType = getContentType(path); // 获取文件类型
if (SPIFFS.exists(path)) { // 如果访问的文件可以在SPIFFS中找到
File file = SPIFFS.open(path, "r"); // 则尝试打开该文件
esp8266_server.streamFile(file, contentType);// 并且将该文件返回给浏览器
file.close(); // 并且关闭文件
return true; // 返回true
}
return false; // 如果文件未找到,则返回false
}
获取文件类型
// 获取文件类型
String getContentType(String filename){
if(filename.endsWith(".htm")) return "text/html";
else if(filename.endsWith(".html")) return "text/html";
else if(filename.endsWith(".css")) return "text/css";
else if(filename.endsWith(".js")) return "application/javascript";
else if(filename.endsWith(".png")) return "image/png";
else if(filename.endsWith(".gif")) return "image/gif";
else if(filename.endsWith(".jpg")) return "image/jpeg";
else if(filename.endsWith(".ico")) return "image/x-icon";
else if(filename.endsWith(".xml")) return "text/xml";
else if(filename.endsWith(".pdf")) return "application/x-pdf";
else if(filename.endsWith(".zip")) return "application/x-zip";
else if(filename.endsWith(".gz")) return "application/x-gzip";
return "text/plain";
}
DNS服务器
#include <DNSServer.h>
const char *ssid = "webcontrol"; //AP的SSID(WiFi名字)
const char *password = "12345678"; //AP的密码
const byte DNS_PORT = 53; //DNS服务端口号,一般为53
DNSServer dnsServer;
setup
IPAddress softLocal(192, 168, 3, 6); //IP地址,用以设置IP第4字段
IPAddress softGateway(192, 168, 3, 6); //IP网关,用以设置IP第3字段
IPAddress softSubnet(255, 255, 255, 0);
WiFi.mode(WIFI_AP_STA); //设置为AP模式(热点)
WiFi.softAPConfig(softLocal, softGateway, softSubnet);
WiFi.softAP(ssid, password);
dnsServer.start(DNS_PORT, "www.me.com", softLocal);
loop
dnsServer.processNextRequest();//处理DNS请求服务
UDP协
//UDP定义
IPAddress sta_client; //保存sta设备的ip地址
unsigned int localUdp = 1234; //监听端口
unsigned int remoteUdp = 4321; //发送端口
unsigned int remoteUdp1 = 4322; //发送端口
char comPacket[255]; //数据缓存
WiFiUDP Udp; //定义udp
初始化函数
void udpBegin() {
if (Udp.begin(localUdp)) { //启动Udp监听服务
Serial.println("监听成功");
//打印本地的ip地址,在UDP工具中会使用到
//WiFi.localIP().toString().c_str()用于将获取的本地IP地址转化为字符串
Serial.printf("现在收听IP:%s, UDP端口:%d\n", WiFi.localIP().toString().c_str(), localUdp);
} else {
Serial.println("监听失败");
}
}
发送接收函数
//UDP发送函数
void sendBack(const char *buffer, int xx) {
if (xx == 1) {
Udp.beginPacket(remoteIp1, remoteUdp);//配置远端ip地址和端口
} else if (xx == 2) {
Udp.beginPacket(remoteIp2, remoteUdp);
}
// Udp.write(buffer); //把数据写入发送缓冲区
Udp.print(buffer);
Udp.endPacket(); //发送数据
}
void udpDo() {
//解析Udp数据包
int packetSize = Udp.parsePacket();//获得解析包
if (packetSize)//解析包不为空
{
//收到Udp数据包
//Udp.remoteIP().toString().c_str()用于将获取的远端IP地址转化为字符串
Serial.printf("收到来自远程IP:%s(远程端口:%d)的数据包字节数:%d\n", Udp.remoteIP().toString().c_str(), Udp.remotePort(), packetSize);
// 读取Udp数据包并存放在incomingPacket
int len = Udp.read(comPacket, 255);//返回数据包字节数
if (len > 0)
{
comPacket[len] = 0;//清空缓存
Serial.printf("UDP数据包内容为: %s\n", comPacket);//向串口打印信息
//strcmp函数是string compare(字符串比较)的缩写,用于比较两个字符串并根据比较结果返回整数。
//基本形式为strcmp(str1,str2),若str1=str2,则返回零;若str1<str2,则返回负数;若str1>str2,则返回正数。
if (strcmp(comPacket, "LED_OFF") == 0) // 命令LED_OFF
{
// digitalWrite(LED_BUILTIN, HIGH); // 熄灭LED
// sendBack("LED has been turn off\n");
}
else if (strcmp(comPacket, "LED_ON") == 0) //如果收到LED_ON
{
// digitalWrite(LED_BUILTIN, LOW); // 点亮LED
// sendBack("LED has been turn on\n");
}
else // 如果指令错误,调用sendCallBack
{
// sendBack("Command Error!");
}
}
}
}
闪存系统操作
写入文件
File dataFile = SPIFFS.open(file_name, "w");// 建立File对象用于向SPIFFS中的file对象写入信息
dataFile.println("Hello IOT World."); // 向dataFile写入字符串信息
dataFile.close(); // 完成文件写入后关闭文件
Serial.println("Finished Writing data to SPIFFS");
确认闪存中是否有file_name文件
**if** (SPIFFS.exists(file_name)){
**Serial**.print(file_name);
**Serial**.println(" FOUND.");
} **else** {
**Serial**.print(file_name);
**Serial**.print(" NOT FOUND.");
}
建立File对象用于从SPIFFS中读取文件
File dataFile = SPIFFS.open(file_name, "r");
读取文件内容并且通过串口监视器输出文件信息
File dataFile = SPIFFS.open(file_name, "r");
**for**(int i=0; i<dataFile.size(); i++){
**Serial**.print((char)dataFile.read()); //dataFile.read()将会读取dataFile文件内容
}
增加信息
File dataFile = SPIFFS.open(file_name, "a");// 建立File对象用于向SPIFFS中的file对象(即/notes.txt)写入信息
dataFile.println("This is Appended Info."); // 向dataFile添加字符串信息
dataFile.close(); // 完成文件操作后关闭文件
Serial.println("Finished Appending data to SPIFFS");
读取目录
String folder_name = "/taichi-maker"; //被读取的文件夹
Dir dir = SPIFFS.openDir(folder_name); // 建立“目录”对象
**while** (dir.next()) { // dir.next()用于检查目录中是否还有“下一个文件”
**Serial**.println(dir.fileName()); // 输出文件名
}
从闪存中删除file_name文件
if** (SPIFFS.remove(file_name)){
**Serial**.print(file_name);
**Serial**.println(" remove sucess");
} **else** {
**Serial**.print(file_name);
**Serial**.println(" remove fail");
}
显示闪存文件系统信息
FSInfo fs_info; //建立了FSInfo 对象,用于存储闪存状态信息
// 闪存文件系统信息
SPIFFS.info(fs_info);
// 可用空间总和(单位:字节)
Serial.print("totalBytes: ");
Serial.print(fs_info.totalBytes);
Serial.println(" Bytes");
// 已用空间(单位:字节)
Serial.print("usedBytes: ");
Serial.print(fs_info.usedBytes);
Serial.println(" Bytes");
// 最大文件名字符限制(含路径和'\0')
Serial.print("maxPathLength: ");
Serial.println(fs_info.maxPathLength);
// 最多允许打开文件数量
Serial.print("maxOpenFiles: ");
Serial.println(fs_info.maxOpenFiles);
// 存储块大小
Serial.print("blockSize: ");
Serial.println(fs_info.blockSize);
// 存储页大小
Serial.print("pageSize: ");
Serial.println(fs_info.pageSize);
字符串转 char数组
const char* aa = str.c_str();
IP地址转字符串
String aa = WiFi.localIP().toString().c_str();